Work by discipline — mechanical, electrical, PLC, robotics, software.
Each discipline page covers capability, toolchain, and links through to the relevant case studies. The work spans industrial automation, stage engineering, and infrastructure.
By discipline
Deep capability pages
Each page covers what I can do, what tools I use, and which projects demonstrate it.

Frames, integration details, DFM/DFA thinking, and assemblies that can actually be built and maintained.
Explore →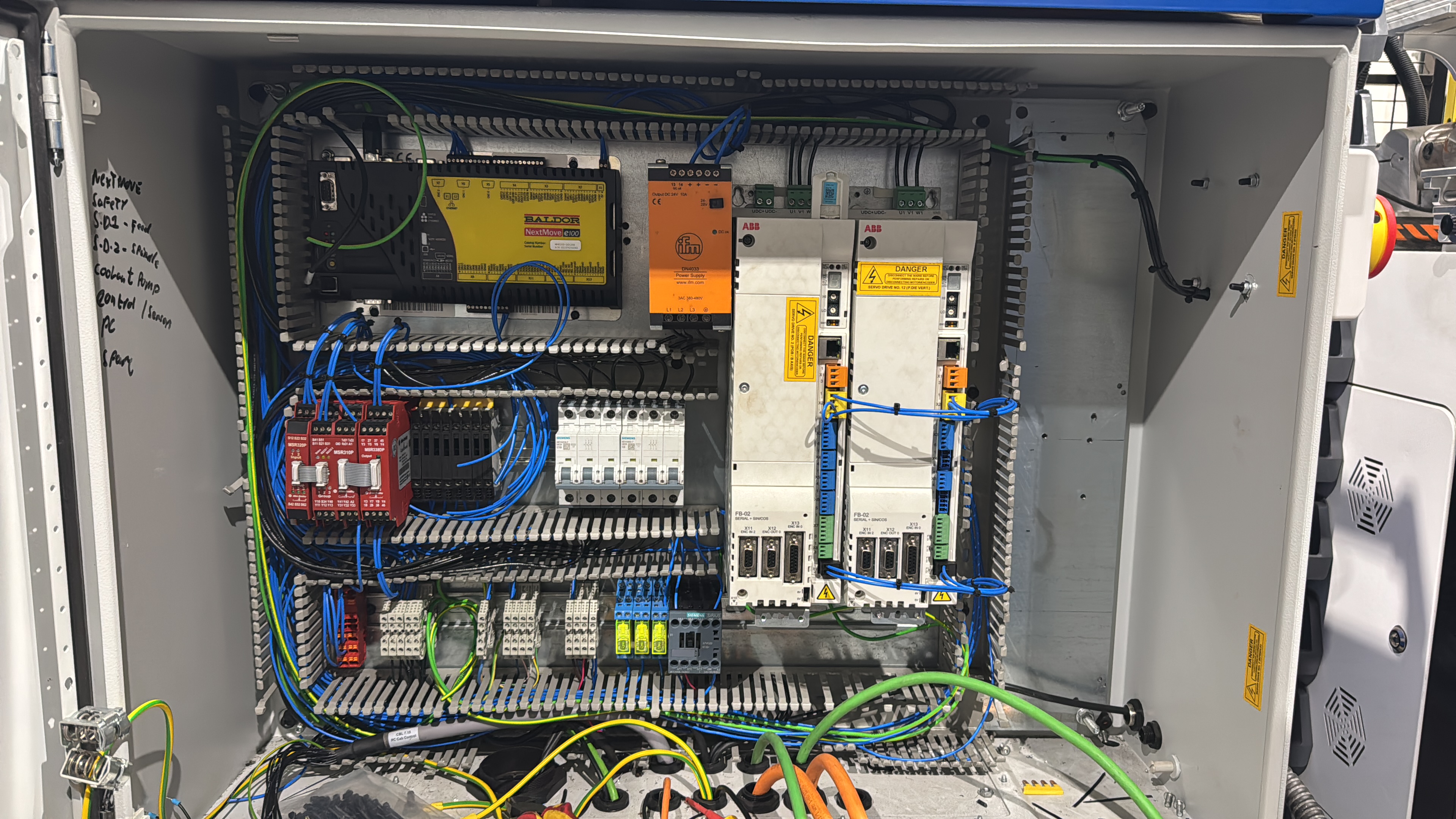
Panels, safety chains, real terminal mapping, and documentation packs that maintenance teams can actually use.
Explore →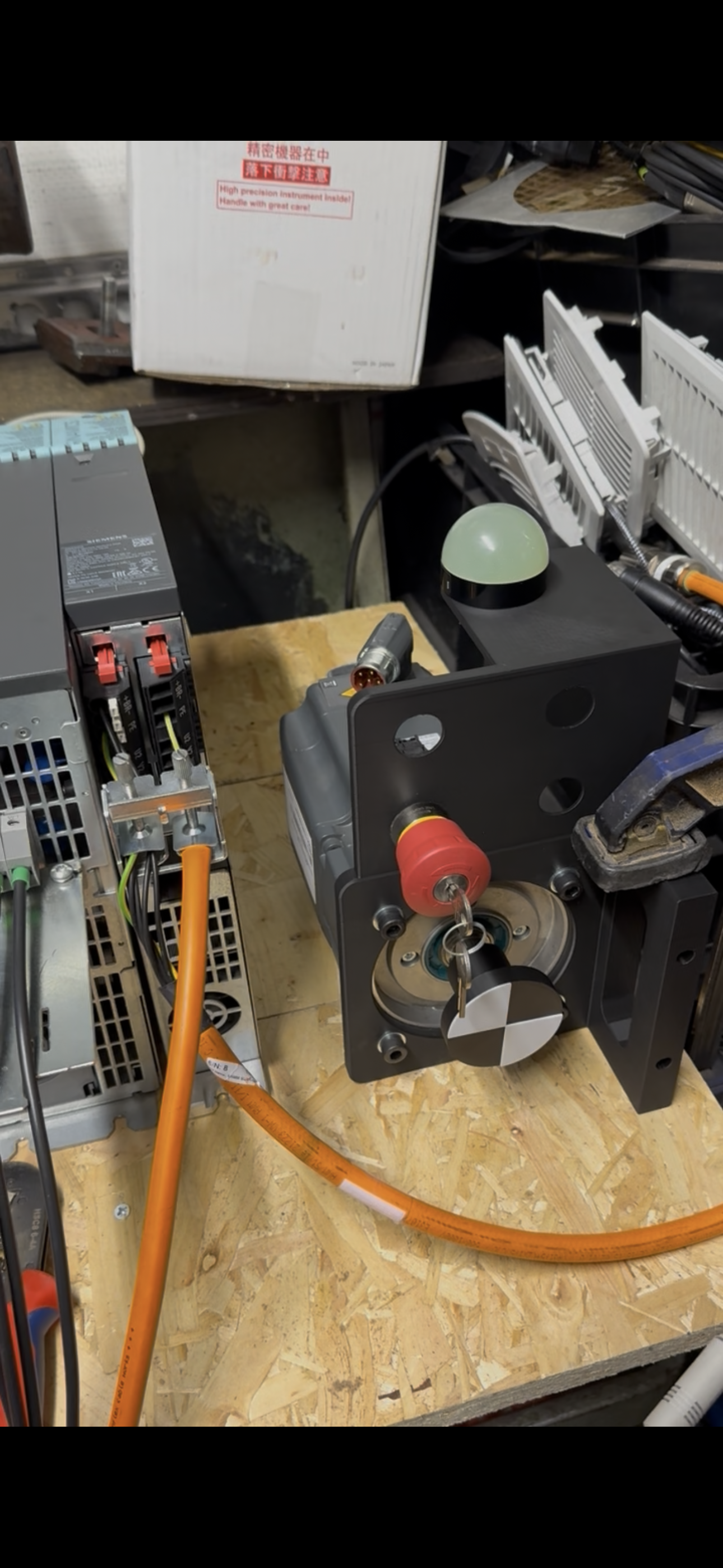
Siemens S120/S210 motion platforms, bring-up workflow, trace-based commissioning, and clear alarm/interlock architecture.
Explore →
FANUC robot integration, cell design, sequence logic, safety architecture, and full commissioning plans.
Explore →
Docker, OPC UA, UniFi networks, CCTV, and access control — infrastructure that passes inspection and supports automation reliably.
Explore →Public engineering helpers: PLC tag encoder/decoder, naming convention reference, and more.
Open tools →Featured work
Selected case studies
Full write-ups with scope, constraints, decisions made, and outcomes. View all projects →

FANUC CNC Robot Tending Cell
Full integration of FANUC robot and CNC machine — from mechanical fit-up through panel build, safety architecture, PLC sequencing, and commissioning.
Read case study →
Siemens S120 Demo Cases
Portable demo rigs built from scratch for training and customer demonstrations. Fully working S120 motion systems in a flightcase.
Read case study →
Workshop Hydraulic Press Rig
Complete fabrication, hydraulic design, panel build, and controls integration for a multi-function press and test rig.
Read case study →Have a project in mind?
Start with what you have, what needs to change, and your timeline. That's enough to have a useful first conversation.