Overview
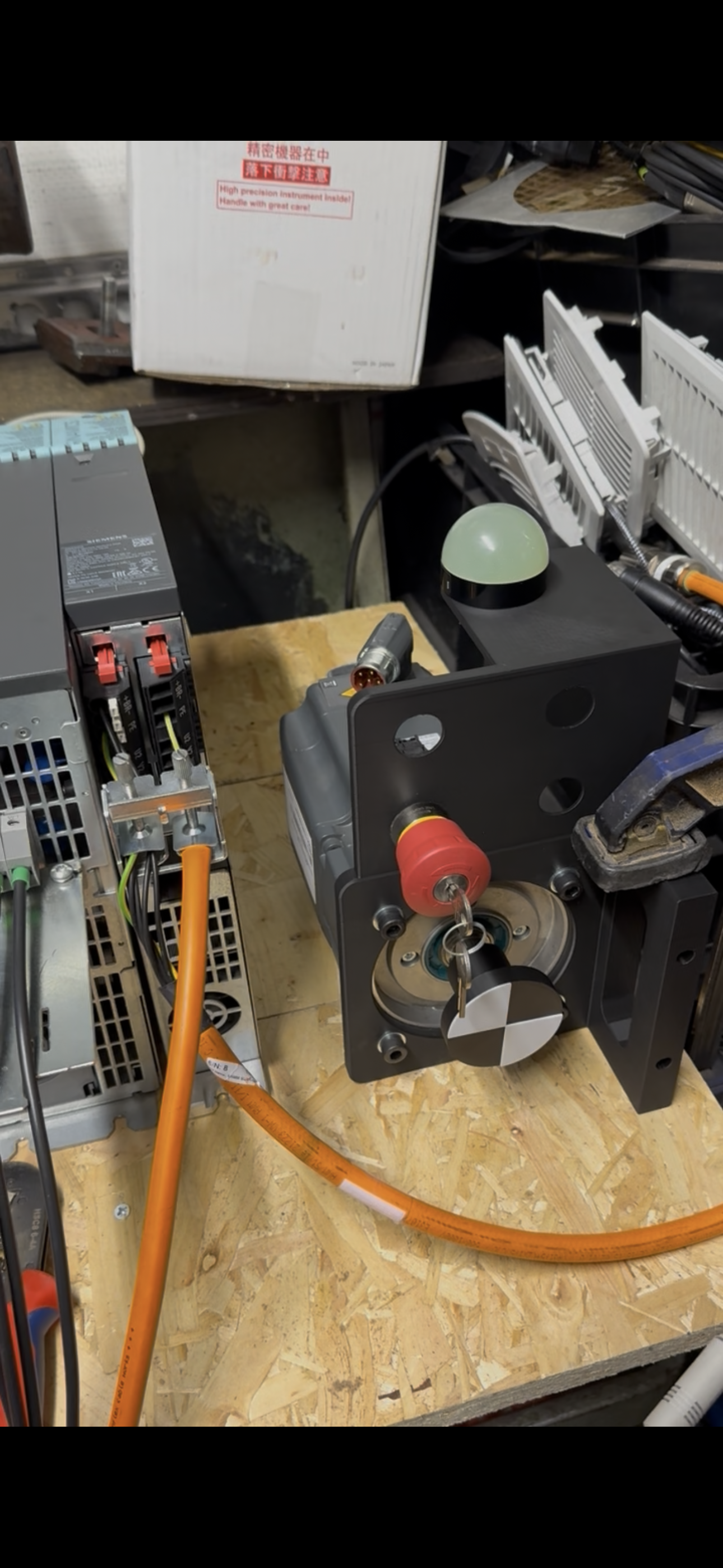
The Siemens S120 demo cases are portable, fully working motion-control systems built into rugged flightcases. Each case contains a Siemens S120 booksize drive stack, motor, encoder, and all ancillaries — capable of running real motion sequences and demonstrating commissioning workflows to customers or training delegates.
The brief came from the need to demonstrate S120 capability without transporting a full machine. The cases needed to survive transit, run reliably at events, and be simple enough that a delegate with no prior Siemens experience could follow a commissioning walkthrough on the hardware.
Design constraints
Flightcase format meant strict size and weight limits. The drive stack had to fit alongside the motor, with enough access for trainees to safely make wiring changes under instruction. Cooling had to be passive or fan-assisted — no noisy extraction.
The electrical layout was designed so that the STO circuit could be intentionally disconnected and reconnected as part of training exercises, without risk to the trainee or the equipment.
What was delivered
- ✓Two flightcase demo rigs with S120 CU320 + PM340 + motor
- ✓Pre-loaded STARTER and TIA Portal commissioning projects
- ✓Training exercise guide for STO wiring and verification
- ✓Carry-on transit cases, used at multiple events and customer sites
Project milestones
Drive stack sizing, motor selection, flightcase sourcing
DIN rail layout, cable management, access panel design
Drive wiring, STO circuit, motor bring-up and tuning
Exercise guide, commissioning walkthrough script
In use at training sessions and customer demonstrations
Gallery


Working on something similar?
Start with the scope, the constraints, and what has to work on day one.